
News & Events
Latest Updates & Industry Insights
- Home
- News
- Technical Knowledge
- Introduction to Horizontal Multi-Joint Robot
Introduction to Horizontal Multi-Joint Robot
November 23,2025
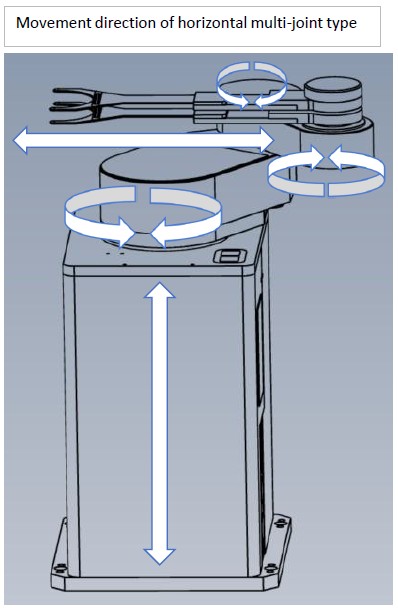
Introduction to Horizontal Multi-Joint Robot
Mainly used for high-speed and high-precision assembly operations.Composed of 2 to 4 joints, allowing for flexible movement on the horizontal plane.
Its mechanical design provides high compliance in the horizontal direction, while maintaining rigidity in the vertical direction—making it especially suitable for insertion, positioning, and handling tasks.
Structural Features
- Horizontal multi-joint structure: Consists of 2 to 4 joints, enabling flexible movement in the XY plane.
- High speed and precision: Suitable for fast transfer and precise assembly, such as wafer handling or electronic component packaging.
- Excellent repeatability: Typically achieves ±0.01 mm to ±0.02 mm.
- High vertical rigidity: Capable of handling tasks requiring stable vertical force, such as insertion and removal.
Advantages
- Ideal for high-volume, high-cycle automated tasks.
- Easy to integrate into existing automated production lines.
- Low maintenance and operation threshold; easy to train operators.
Disadvantages
- Typically has 4 degrees of freedom (X, Y, Z, θ), making it less flexible than a 6-axis robot.
- Difficult to handle tasks that require complex spatial posture changes. (e.g., tilted gripping or multi-angle assembly)
- Not well-suited for highly diversified or frequently changing production requirements.