
News & Events
最新情報と業界動向をお届けします
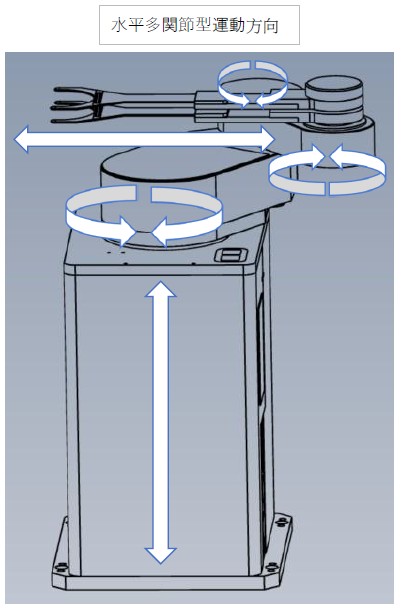
水平多関節ロボット紹介
Nov 23, 2025
水平多関節ロボット紹介
高速・高精度な組立作業に使用されるロボット。2~4つの関節で構成されており、水平方向で柔軟な動作が可能。
その構造設計により、水平方向では高い柔軟性を持ち、垂直方向では剛性があり、挿入、位置決め、搬送などの動作に適している。
構造の特徴
- 水平多関節構造:2~4つの関節で構成され、XY平面での柔軟な動作が可能。
- 高速・高精度:ウエハーや電子部品の挿入・パッケージなど、迅速な搬送や精密組立に適している。
- 優れた繰り返し位置決め精度:一般的に±0.01mm〜±0.02mm程度。
- 垂直方向に高い剛性:抜き差しなど安定した垂直方向の力を必要とする作業にも対応可能。
メリット
- 大量生産・高タクトの自動化作業に適している。
- 既存の自動化ラインへの統合が容易。
- メンテナンスや操作が簡単で、トレーニングも容易。
デメリット
- 一般的に自由度は4軸(X, Y, Z, θ)で、6軸ロボットほどの柔軟性はない。
- 傾けての把持や多角度の組立作業など、複雑な空間姿勢変化が求められる作業には対応しにくい。
- 多様化・頻繁な変更のある生産ニーズへの対応が難しい。