
News & Events
Latest Updates & Industry Insights
- Home
- News
- Technical Knowledge
- Introduction to Cylindrical Coordinate Robot
Introduction to Cylindrical Coordinate Robot
October 22,2025
Cylindrical Coordinate Robot Introduction
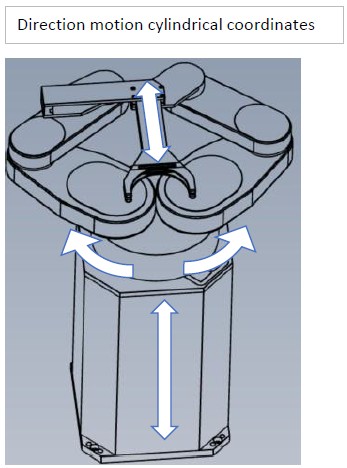
A cylindrical coordinate robot is an industrial robot that operates based on a cylindrical coordinate system.It creates a "cylindrical" working space through three main movements:
rotation (θ-axis), vertical motion (Z-axis), and horizontal linear motion (R-axis).
Its key feature is the ability to move the arm straight in and out horizontally.
Structural Features
- Rotating base: Allows rotation around a vertical axis
- Linear guide: Enables vertical up-and-down movement
- Telescopic arm: Performs linear reciprocating motion in the horizontal direction
- The mechanical design is relatively simple, making it easy to control and maintain.
Advantages
- Effectively covers cylindrical work areas.
- Simple vertical and horizontal movements make it suitable for stacking and loading/unloading tasks.
- Stable structure and relatively low cost.
- Simple control system that is easy to deploy.
Disadvantages
- Movement speed and flexibility are inferior to SCARA or six-axis robotic arms.
- Relatively low accuracy.
- Not suitable for complex paths or high-speed precision applications.