
Products
半導体・ハイテク製造向けに設計
- ホーム
- 取扱製品情報
- JEL 半導体搬送ロボット
- 水平多関節型クリーンロボット
- GTVCR5330



水平多関節型クリーンロボット
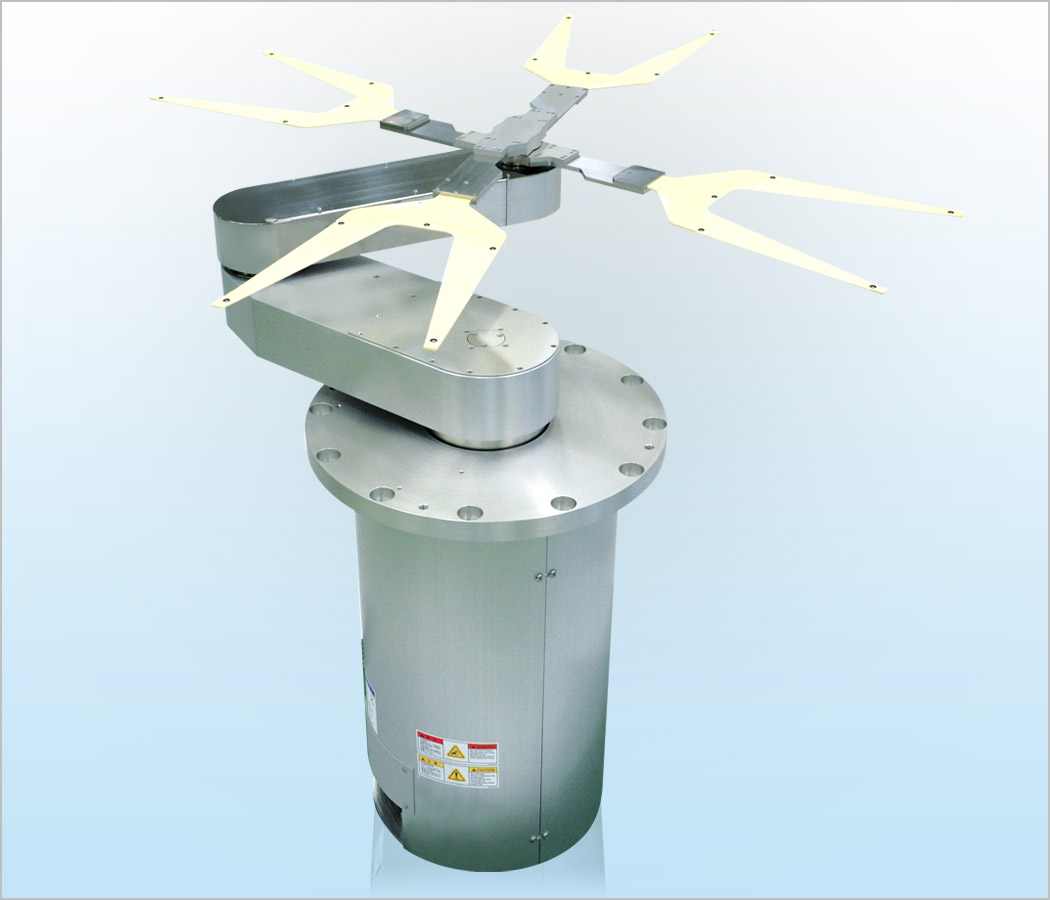
GTVCR5330
5軸真空水平多関節型真空対応クリーンロボット
- 特徴
- 5軸真空水平多関節型クリーンロボット GTVCR5000シリーズ。
- 従来機GTVHR5000シリーズの性能、機能を維持したまま価格ダウンを実現。
- 真空環境下の並列配置されたチャンバーステージへ搬送することができます。
- 多彩な装置レイアウトへの対応が可能です。
- フットプリントの縮小化、真空引容積の縮小化に寄与します。
- チャンバ加工のシンプル形状化による加工コスト削減が可能です。
- レイアウトのインライン化に最適。
- アブソリュートエンコーダ仕様のサーボモータを使用しており、原点復帰が不要です。
製品紹介
モデル名
GTVCR5330
設置環境
磁性流体シール及びフィルタにより対策
クリーンルーム内大気:温度 15℃〜40℃
プロセスチャンバ内温度: 最大450℃
昇降距離(Z軸)
60mm
可搬質量
4 kg(第3関節換算)
製品特徵
5軸真空水平多関節型クリーンロボット GTVCR5000シリーズ。
従来機GTVHR5000シリーズの性能、機能を維持したまま価格ダウンを実現。
真空環境下の並列配置されたチャンバーステージへ搬送することができます。
多彩な装置レイアウトへの対応が可能です。
フットプリントの縮小化、真空引容積の縮小化に寄与します。
チャンバ加工のシンプル形状化による加工コスト削減が可能です。
レイアウトのインライン化に最適。
アブソリュートエンコーダ仕様のサーボモータを使用しており、原点復帰が不要です。
- アームバリエーション:280 mm、330 mm
- アーム関節部には磁性流体シール使用
- 真空シール:磁性流体シール及びベローズ使用
- クリーン対応:アーム内排気用に5µmメッシュフィルタ装備
- ツインチャック採用によりウェーハ交換時間の短縮
- 動作モニター装備
- 制御方式:RS232C及びパラレルフォトI/O
- 全軸アブソリュートエンコーダ内蔵ACサーボモータ使用
- S字加減速制御によりウェーハを高速、高精度に搬送
- ウェーハ保持:落し込み、自重グリップチャック、Oリングによる摩擦保持
- チャック材質はCFRP、アルミニウム、セラミクス等各種対応可能
- 被搬送物、装置レイアウトに合わせた最適チャックでの対応可能
標準仕様
| ロボットアーム型式 | GTVCR5330-060-AM | ||
|---|---|---|---|
| 搬送対象物 | ~300mm ウェーハ | ||
| 機械構造 | 5軸水平多関節型 | ||
| モータ | ACサーボモータ | ||
| 可動範囲 | アーム第3関節中心:635 mm 旋回角度(θ軸):360度 上下ストローク(Z軸):60 mm |
||
| 搬送速度(平均) | アーム(R軸):640 mm/sec 旋回角度(θ軸):160度/sec 上下ストローク(Z軸):60 mm/sec |
||
| 搬送速度(最高) | アーム(R軸):950 mm/sec 旋回角度(θ軸):200度/sec 上下ストローク(Z軸):85 mm/sec |
||
| 分解能 | 第1関節軸(J1軸):0.00081度 第2関節軸(J2軸):0.00081度 第3関節軸(J3軸):0.00072度 第3関節軸(J5軸):0.00072度 Z軸(J4軸):0.98µm |
||
| 搬送レベル | 219 mm(フランジ取付面より上チャックの搬送面まで) | ||
| 繰り返し精度 | ±0.1mm以内 | ||
| クリーン対策 | 磁性流体シール及びフィルタにより対策 | ||
| 耐真空度 | 1×10-6Pa | ||
| ユーティリティ | 電源:単相AC200〜230V 2 kVA 50/60Hz | ||
| コントローラ型式 | C5000Sシリーズ | ||
| インタフェース | RS232C、パラレルフォトI/O | ||
*
半導体搬送ロボット
GTVCR53305軸真空水平多関節型クリーンロボット
環境と仕様
製品概要
- モデル名
- GTVCR5330
- 設置環境
- クリーンルーム内大気:温度 15℃〜40℃
プロセスチャンバ内温度: 最大450℃ - アーム
- シングルアーム
- 到達距離
- 635 mm (第3関節中心距離)
- 昇降距離
- 60 mm
- 可搬質量
- 4 kg以下 (第3関節換算)
製品型式一覧
| 型式と昇降距離(mm) | |
|---|---|
| GTVCR5330-060-AM | 60 mm |
製品動画
画像, 動画はGTVCR5330-060-AMです(※画像及び動画は4枚チャックを使用しています)
製品特徴
5軸真空水平多関節型クリーンロボット GTVCR5000シリーズ。
従来機GTVHR5000シリーズの性能、機能を維持したまま価格ダウンを実現。
真空環境下の並列配置されたチャンバーステージへ搬送することができます。
多彩な装置レイアウトへの対応が可能です。
フットプリントの縮小化、真空引容積の縮小化に寄与します。
チャンバ加工のシンプル形状化による加工コスト削減が可能です。
レイアウトのインライン化に最適。
アブソリュートエンコーダ仕様のサーボモータを使用しており、原点復帰が不要です。
- アームバリエーション: 280 mm, 330 mm
- アーム関節部には磁性流体シール使用
- 真空シール:磁性流体シール及びベローズ使用
- クリーン対応:アーム内排気用に5µmメッシュフィルタ装備
- ツインチャック採用によりウェーハ交換時間の短縮
- 動作モニター装備
- 制御方式:RS232C及びパラレルフォトI/O
- 全軸アブソリュートエンコーダ内蔵ACサーボモータ使用
- S字加減速制御によりウェーハを高速、高精度に搬送
- ウェーハ保持:落し込み、自重グリップチャック、Oリングによる摩擦保持
- チャック材質はCFRP、アルミニウム、セラミクス等各種対応可能
- 被搬送物、装置レイアウトに合わせた最適チャックでの対応可能
標準仕様
製品操作ビデオ
以下の操作ビデオは、GTVCR5330-060-AM モデルです。



